背景:车联网作为半导体、智能计算、无线通信、汽车制造和交通运输等行业深度融合的新型产业平台,在提升交通安全与交通效率方面拥有巨大的潜能。而路侧基础设施是车联网新基建的重要组成部分,相关细分产业正在加速应用落地的步伐。
近日,英特尔完成了车联网中基于英特尔架构的激光雷达3D点云处理与感知融合方案白皮书的审核,对外公开了路侧感知和路侧边缘计算解决方案。

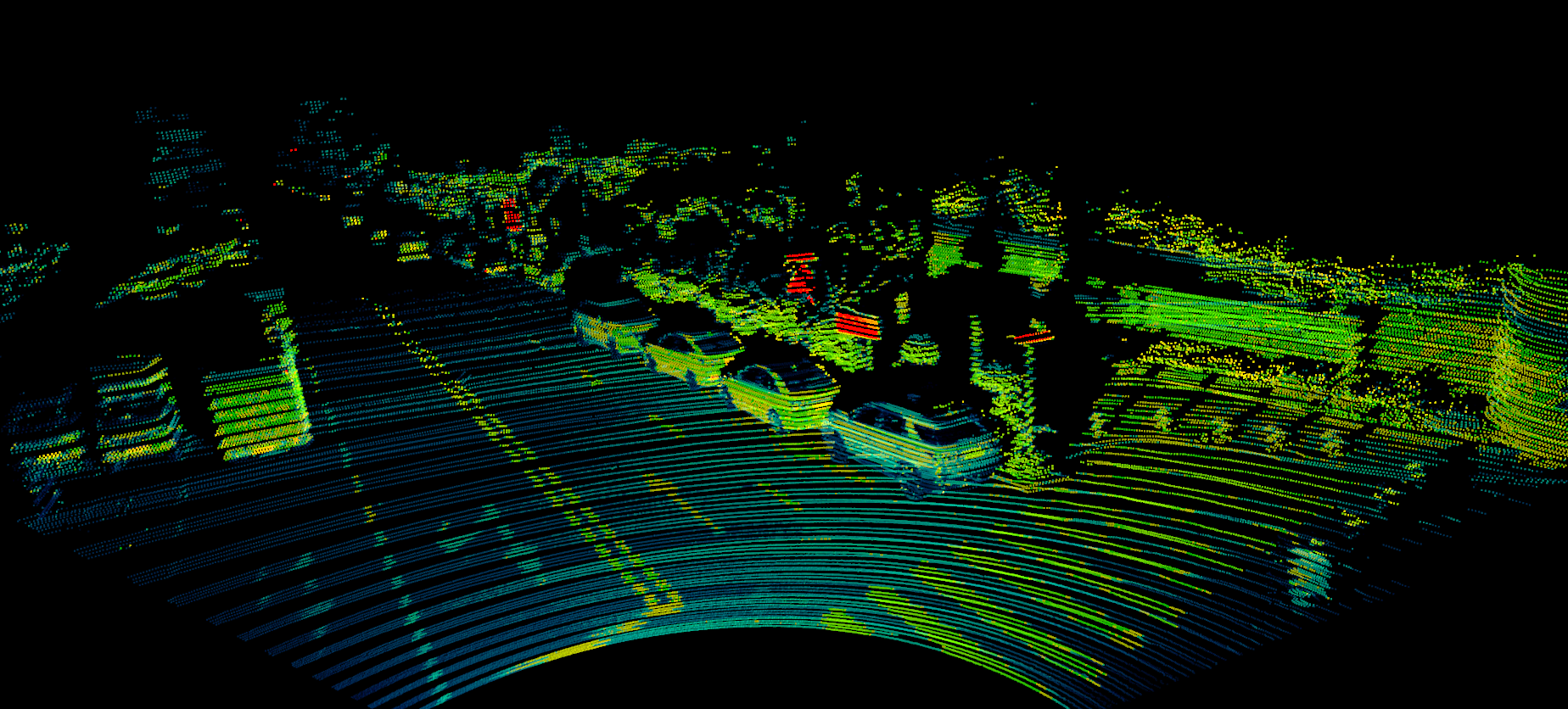
基于英特尔架构,镭神智能的CH128X1 128线车规级混合固态雷达也参与了此方案的支持,为路侧边缘计算设备深度学习提供超清晰、多维度的3D点云数据,与摄像头一起感知融合,有效提高数获获取的准确性与可靠性。
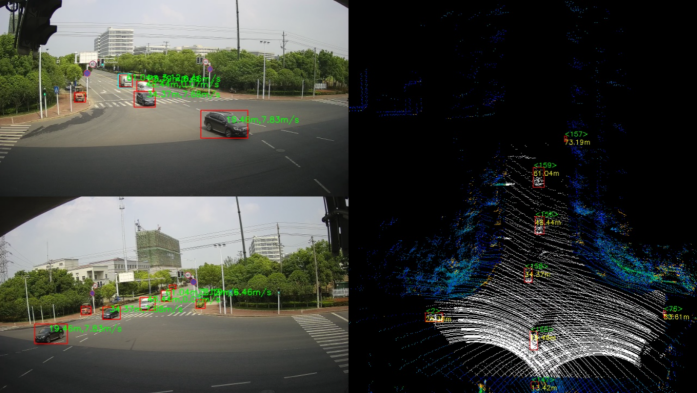
白皮书中特别介绍道,激光雷达正在成为智能交通领域越来越重要的一种传感器。作为路侧感知设备的激光雷达,由于其 3D 成像和精确测距等卓越性能,受到越来越广泛的应用。基于英特尔® 架构的路侧边缘计算设备,在处理激光雷达生成的 3D 点云中 (无论是深度学习还是传统计算机视觉),都显示出了卓越的性能。
继在北京、上海、广州、深圳、重庆、苏州、郑州、许昌、西安、常州、天津、武汉等数十个城市完成50多个车路协同方案的落地之后,镭神智能激光雷达以其高精度、高性能的特点,再次被成功认证。
相信这套基于英特尔架构的激光雷达3D点云处理和感知融合方案,将会为车联网积极赋能,为丰富多样的智能交通场景提供交通安全与效率的提升作用。
此次镭神智能与英特尔及集合诚的合作,加速了相关产品与解决方案的研发,有利于促进基于车联网的车路协同方案早日实现商用。




具体方案请查看以下链接
![]() 车联网中基于英特尔® 架构的激光雷达 3D 点云处理与感知融合方案.pdf
车联网中基于英特尔® 架构的激光雷达 3D 点云处理与感知融合方案.pdf










