法国国家铁路公司(SNCF)的 PRIME 铁路机器人,在轨道交通自动驾驶的障碍物检测方面,取得了令人振奋的进展,而这一成果背后,镭神智能激光雷达发挥了关键作用。
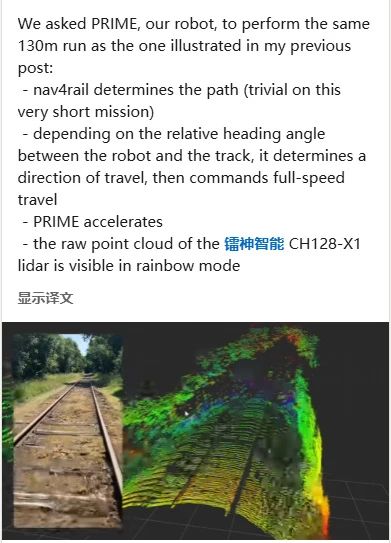
SNCF的工程师团队最近分享了一段视频,详细展示了他们如何将 nav4rail 与一个 LIDAR专用障碍物检测模块成功结合并进行测试。而此次测试中,镭神智能的CH128X1激光雷达成为检测系统的“慧眼”,为机器人精准感知周围环境提供了有力支持。 在这次实地测试中,PRIME机器人完成了一段130米长的既定路线,整个过程是这样的: 路径规划与方向判断: nav4rail负责确定运行路径(对于短距离任务而言相对简单),并根据机器人与轨道的相对航向角,确定行驶方向,然后指令全速行驶。 机器人加速: PRIME机器人开始加速前进。 实时点云可视化: 镭神智能 CH128-X1激光雷达的原始点云以彩虹模式显示,以便清晰地观察环境。 障碍物初期可见性: 从运行一开始,一个椅子就在点云中清晰可见(尽管在视频中不那么明显)。 障碍物识别: 在第8秒时,椅子作为障碍物变得非常明确。 检测区域与制动: 在第10秒时,椅子进入了机器人前方15米范围的检测区域。值得注意的是,只有当障碍物进入这个15米区域时,障碍物检测系统才会开始寻找潜在问题,这是因为PRIME机器人的制动距离约为8米。 障碍物标记与速度调整: 一旦椅子被识别为障碍物,相应的点云簇会以黑白显示,这有助于可视化分析。根据障碍物簇与机器人的距离,系统会基于二次减速曲线计算出一个速度指令. 指令优先级与停车: 一个信号聚合包将这个速度设定值与nav4rail的速度指令进行整合,其中障碍物检测指令拥有最高优先级。因此,PRIME的控制器会接收到降低的速度指令,直至PRIME完全停止。 值得一提的是,此次项目中应用的镭神智能905nm激光雷达 CH128X1已经展现出卓越的性能,为轨道交通自动驾驶的障碍物检测提供了可靠保障。与此同时,镭神智能还拥有性能更为强劲的1550nm光纤激光雷达可供轨道交通领域选用。镭神智能1550nm光纤激光雷达在探测距离、精度以及抗干扰能力等关键指标上拥有进阶的表现,可为轨道交通自动驾驶提供更高等级的安全保障,实现更精准细致的环境感知。 法国国家铁路公司(SNCF)与镭神智能的成功合作,为轨道交通自动驾驶的发展树立了新的标杆。未来,镭神智能将继续深耕激光雷达技术,不断推出更优质的产品,与全球合作伙伴携手共进,推动轨道交通行业向更加安全、智能、高效的方向发展。 深圳市镭神智能系统有限公司 24小时全国服务热线:4008306266 激光雷达中文官网:www.leishen-lidar.com 激光雷达英文官网:www.lslidar.com 无人叉车中文官网:www.leishenrobot.cn 无人叉车英文官网:www.leishenrobot.com 总部地址:深圳市宝安区沙井街道沙四东宝工业区R栋厂房 无人系统基地:深圳市宝安区环镇路智基先进制造产业园 徐州工厂:徐州市睢宁县徐州空港经济开发区安澜大道东,临空大道北S05厂房 济南工厂:山东省济南市历城区智能传感器产业园A9栋 重庆工厂:重庆市巴南区界石镇石桂大道16号4幢2-1